Lego Robot (CLAM)
In this project, we programmed a LEGO robot using Python to perform specific tasks, such as navigating a course, avoiding obstacles, and completing challenges. The robot was built using LEGO Mindstorms components, including motors, sensors, and a programmable brick. We used the EV3 MicroPython environment to write and upload Python code to the robot, enabling it to interact with its environment through sensor inputs and motor outputs. Key features of the project included:
- Sensor Integration: Utilizing ultrasonic, touch, and color sensors to detect obstacles, follow lines, and make decisions.
- Motor Control: Writing precise motor control logic to navigate the robot through complex paths.
- Algorithm Design: Implementing algorithms for decision-making, such as obstacle avoidance and line following.
- Testing and Iteration: Continuously testing and refining the code to improve the robot's performance and reliability.
This project provided hands-on experience with robotics, programming, and problem-solving, demonstrating the practical applications of Python in engineering and design.
CLAM (Carson Logan Alex Mike)
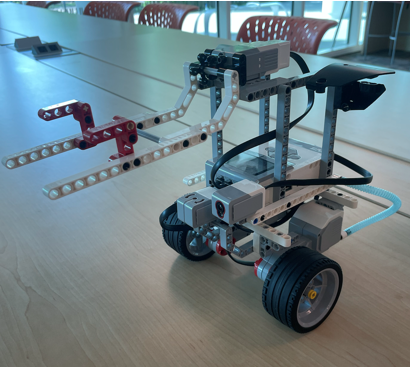
The LEGO robot in its entirety!